
Data-driven Control Design for Damping Oscillations |
|
|---|
In today's interconnected power grids, low-frequency oscillation is a significant issue limiting the transmission line power transfer capability and even deteriorating power system security. Power system damping controllers are usually designed and tuned based on the system circuit model around a particular operating point. Since this system circuit model requires detailed dynamic models and parameters for each component of the power grid, a practical model could not include sufficient details to be accurate, due to the large number of loads and the approximation inherent in a component model. In addition, the system circuit model is generally updated every few months at best. Changing grid conditions make the one snapshot model not very useful.
The increasing deployment of Phasor Measurement Units (PMUs) makes it possible to derive a measurement-based transfer function model describing the input and output relationships within a power system. A measurement-based model doesn't rely on the dynamic model of each component and can be easily updated in real time to reflect the changes in power system operation conditions. Hence, the measurement-based model can be more accurate than a system circuit model and is a good candidate for oscillation control design.
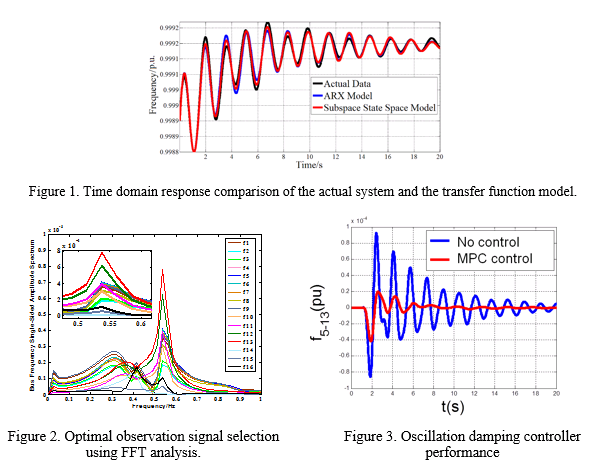
The main objective of this research is to explore the opportunity of using a measurement-based transfer function model for damping control design. The system identification technologies using the Auto-Regressive with eXogenous input (ARX) model and the subspace state space model were utilized to construct the transfer function model with pure measurement data during events to represent system dynamics. Fast Fourier Transform (FFT) analysis was adopted to select the optimal observation signal and the residue method was adopted to select the optimal actuation signal for the target mode. In addition, the Model Predictive Control (MPC) strategy was employed to design the damping controller. Two case studies in Kundur's system and the NPCC system have demonstrated the viability of the proposed methodology for damping control with the measurement-based transfer function model.
References
[1] Y. Zhang and A. Bose, "Design of Wide-Area damping controllers for interarea oscillations," IEEE Trans. Power Syst., vol. 23, no. 3, pp. 1136-1145, August 2008.
[2] Eriksson, R., X. So, and L. Der, "Wide-area measurement system-based subspace identification for obtaining linear models to centrally coordinate controllable devices". IEEE Trans. Power Del., vol. 26, no.2, pp. 988-997, Apr., 2011.